- ��ȫ��Ӗ > ��ȫ֪�R�v�� > �طN���I > ����
- ����
����τ�ϵ�y��һ��--������τ�ϵ�y
��������τ�ϵ�y��늄әC��늷N^�֣��н����τ�ϵ�y��ֱ���τ�ϵ�y��ֱ���τ�ϵ�y�İl늙C����늄әC�ɿع���ϵ�y���ɿع�ֱ�ӹ��ϵ�y�������τ�ϵ�y�н����p��늄әC�������{���{��ϵ�y��׃�l׃���{��ϵ�y��
����ֱ��늄әC�{�٣��Cе����Ӳ���{�ٷ�����ȃ��c����ֱ��늄әC���ГQ�����ճ��S�o�����ܸߵ�ȱ�c���������Ԫ�����ĸ��ٰlչ���ʸ߷�����Ч�����O��IGBT�Ć�����ʹ��׃�l׃���{��ϵ�y���ӳ��졣����τ�ϵ�y�������ѳɞ�F����׃�l׃���{��ϵ�y������������w�eС�����ܵȃ��c�����{�����ܷ�������cֱ���τ�ϵ�y������Ŀǰ����׃�l׃���{�ٵ�������ٶȿ�
�_6m��s��
��һ�� ֱ������τ�ϵ�y
����ֱ��늄әC���{�����ܺã��{�ٷ�������������τ�ϵ�y���ѱ��V�����ã����ڵĸߌӽ���������ٶȿ��_7m��s������ҕ�����5m��s��
����ֱ��늄әC���{��ԭ����
���������·�D4��1�г�ֱ��늄әC��늄�ƽ�ⷽ��ʽ��
������늄әC�D��ʩ�ӵ�늉��c��늄ݵ��Pϵ��

����늄әC��늄��c��Ŵ�֮ͨ�g���Pϵ��

���� ������ֱ��늄әC���D�ٵ��Pϵʽ��
����ʽ�У�
����Ea����늄әC�Б�늄�ʽ
����Ua�������늉�
����RaT����������
����RT����������
����Ia�����D�����
����UT�������늉�
����IT����������
����Ce����늙C��Ч
���� ������Ŵ�ͨ
������Ŵ�ͨ
����n����늄әC�D��
����Ra����늄әC�D�����
�D4��1 ֱ���{���·
���������Ϲ�ʽ��ֱ֪��늄әC�{�ٷ�������������׃���늉�Ua�����D���·�д�����{��輰RaT����׃���Ӵ�ͨ���������{��늄әC���D�١����׃RaT�c�r��늄әC����׃ܛ��ͬ�r�{������С��
������׃���늉�Ua�����ԫ@�ñ��^����{�ٷ���������D�Ӄ���Ra��С���Cе����Ӳ�Ⱥܸߡ�
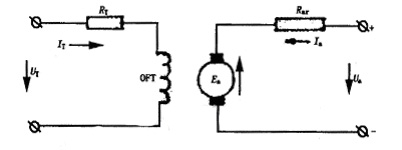
�����ڲ�ͬ�Ĺ��늉��£����ԫ@��һ��늄әC�ęCе���ԡ�Ҋ�D4��2������Ua���ӕrn׃��Ҳ��С���{�ٷ����c늉�׃�������ȡ�
�D4��2 �C���
����![]()
����nH����늄әC�~���D��
����n�����{���D��
����������~���ٶ�1��75m��s��ƽ���ٶ�0��15m��s���ԡ��{�ٷ���1��12�Ϳ����ˡ�
����ֱ������τ�ϵ�y�{�ٷ�ʽ�ЃɷN���ɿع蹩�ϵ�y�Ϳɿع���ϵ�y��
����һ���ɿع蹩�ϵ�y
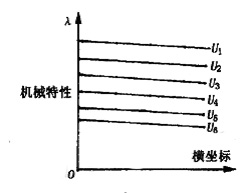
����ԓ���ϵ�yһ�����ڟo�X݆�ĸ�������У���D4��3��ʾ������׃����BO��늾W��늸��x���ã�ͬ�r�o�ɿع������b��SCR1�cSCR2��늡�SCR1�����M�ɿ������b�ã�SCR2�鷴�M�ɿ������b�ã��ɽM�ɿع跴������������\�Еr����M����������M̎����׃��B����������\�Еr��������M����������M̎�ڴ���׃��B��1L��2L늿�����Mֱ��늄әC�D�ӡ�
�D4��3 ���·
���������ɿع���ϵ�y
������ֱ����������{�����ѵõ��V�����á���Ҫ������SCR�������{��ֱ���l늙C�ň�����Ĵ�С�Ը�׃�l늙C���D��ݔ��늉�Ua������ֱ��늄әC���D�٣��_���{�ٵ�Ŀ�ġ�
����1������ɿع���ϵ�y
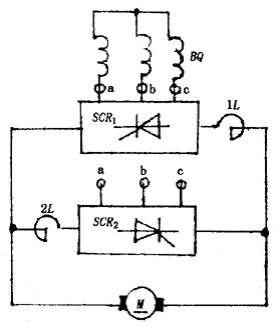
�������·��D4��4��ʾ����6ֻSCR�M������벨��ʽ������·��
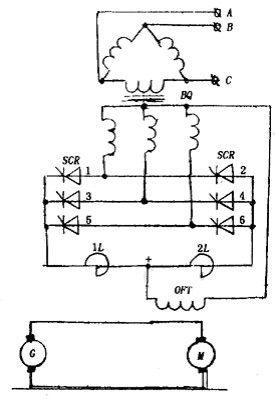
�D4��4 ��������·
����늿���1L�c2L�Ǿ���늿��������ƭh����OFT�ǰl늙C��Ŵň���Ȧ��G�l늙C�D�ӡ�M늄әC�D�ӡ�BO�ǡ���Y�ӷ�������׃������
�����D4��5�ǰl늙C늄әCϵ�y����ʾ��D��ֱ���l늙CG�������ཻ��ԭ�әCM�ӡ��l늙C�ň��@�MOFT����������ɿع�SCR�����b�Ä�š��y�ٰl늙CTG�cֱ��늄әCMͬ�S���y�ٰl늙C�l����늉��c늄әCM���D�ٳ����ȡ�늄әC�������ň��@�MOM����һֱ���Դ��늣����R�����{����������
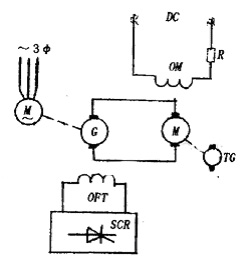
�D4��5 ֱ������ʾ��D
�����ڷ���D4��6�С��o��������ֱ�������Դ���ɷ����^���JSY��JXY����܇�^���JQF���z���^���JLF�M��늉����������oһ�ηe����ݔ��һ�����Է���Ĺ��S늉�����һ�ηe���·�О��˼ӿ�e�֕r�g������ٶ������ľ��Զȣ�߀���ø߉������Դ������ʹ�ٶ��������^���뻯�ڶ��ηe���·��ݔ���и����˶��O���D�Q�·��100H��늿������Ա�õ���ʼ���タ�������݆������m�С����ηe�ֺ�õ�һ���������ԕr�g��ԭ�t������\���ٶ���������ݔ���o�ٶ��{������������ٶ��M���{�����ٶ��{�����ɱ����Ŵ����������e�֭h���M�ɡ�
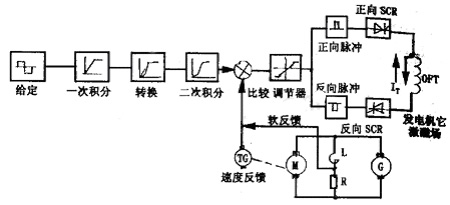
�D4��6 �������ϵ�y����D
�����y�ٰl늙C��늄әC���Ӱl늣��õ�һ���c����ٶȳ����ȵ�늉���̖����O���c�o��늉��෴�����{����ݔ��˽o��늉��c�y�ٰl늙C늉������^�õ�һ���ٶȲ���̖���ӵ������e���{�������M�зŴ��{������ݔ��늉�ʩ�ӵ������|�l����ʹ�������}�_�|�l��ͬ�r�õ��ɂ���С��ȡ���̖�෴�Ŀ�����̖��ʹ�ɽM�|�l���a�����}�_ͬ�r��ɂ��෴�ķ���λ�ƣ��Á����ƿɿع�������ݔ��늉��Ĵ�С�͘O�ԡ�
���������ݿ����·�����Ϸ���JSY����JQF���o����(+)늉����c�y�ٙC���^��o�{����һ����ݔ�룬����һ��ؓݔ����ʹ�����}�_ǰ�ƣ��䌦����1��3��5SCR̎������ݔ����B���c��ͬ�r����M�}�_���ƣ��䌦����2��4��6SCR̎�ڴ���׃��B�������M�o�l늙C�����@�Mһ��I+����Ą�������������\�У���֮��������\�С���ϵ�y�е�늉�ܛ�����h����늸�L�����R�M�ɡ�ȡ���R��늉����鷴����̖��늸�L�Ѱl늙C늉��ĸߴ��C���V�������R��늉���RC�ֺ�ӵ��{������ݔ��ˣ����·������_ʼ���Ӻ��Ƅ��������á�
����2������ɿع���ϵ�y
��������ɿع���ϵ�y���·���s�ɱ��ߣ���˲��Æ���ɿع���ϵ�yҲ�ܝM�������ݵ�Ҫ��
�����ڷ���D4��7�п��Կ������{�����dž���ݔ������һ���νY���w���}�_�l��������ͬ�r�|�l�ɂ��ɿع衣ԓϵ�y�Dz�����ġ�ֻ��ͨ�^�����^���JSY��JXY��׃���������������ݵ������c���С��e�������D�Q�·�c�������ϵ�y��ͬ��
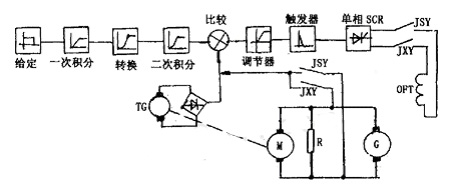
�D4��7 �������ϵ�y����D
����3���{���Ŵ����Ĺ���ԭ��
�����������τ�ϵ�y�Ќ��ٶȵ��{�������ñ����e���{������������τ�ϵ�y�ПoՓ�����{��߀��ֱ���{�ٶ������ٶ��{���������@�ﺆ���乤��ԭ������ϵ�y�е����á�
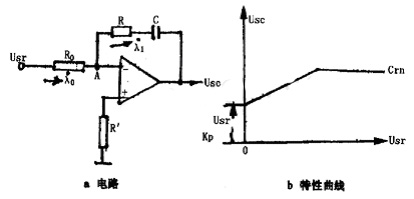
�D4��8 PI�{����
�����ڈD4��8a�У�A�c��̓�أ����Ŵ����_�h����ܸߡ�����ݔ��늉��Ľ^��ֵ�ǣ�
���� �����Ŵ���ݔ���迹�dz�������
�����Ŵ���ݔ���迹�dz������� ���{������ݔ��늉�
���{������ݔ��늉�
���� ���Ĺ�ʽ���Կ�����ݔ��늉��Ƀɲ��ֽM�ɣ�ݔ��늉��ͷŴ��ij˷e�����늉��ķe�֡�����������Ҳ��ֱ�ӿ�����
���Ĺ�ʽ���Կ�����ݔ��늉��Ƀɲ��ֽM�ɣ�ݔ��늉��ͷŴ��ij˷e�����늉��ķe�֡�����������Ҳ��ֱ�ӿ�����
�������������Ǯ��{������һ���ӑBݔ��r�������C�迹��С���ƞ��㣬�@�r�{�����ķŴ����^�ͣ� �{����ݔ��늉��͡���ݔ��Usr�����r��������ஔ���_·���Ŵ����ķŴ��ܸߣ��ӽ��_�h�Ŵ����档���Բ����{�������Ե��^�ߵ��o�B���棬���ܾ����^��ķ����ٶȡ�
�{����ݔ��늉��͡���ݔ��Usr�����r��������ஔ���_·���Ŵ����ķŴ��ܸߣ��ӽ��_�h�Ŵ����档���Բ����{�������Ե��^�ߵ��o�B���棬���ܾ����^��ķ����ٶȡ�
����������τ�ϵ�y�У����ؓ�d��׃����늄әC���늉��IJ��ӣ������ԾS��늄әC���١��Ķ�ʹϵ�y���ЙCе����Ӳ���{�ٷ�����������m�кã�ƽ�Ӿ��ȸߵă��c��
����4���ɿع���ϵ�y���ٶ�����
�����������ϵ�y�ٶ�������
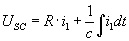
�����D4��9a����1��һ�ηe�����1C����Ȼ������ԡ�����2�ǎ��и����ԴVF�ij�����ԡ��D4��9b���ڶ��ηe�����2C����·�д���100H늸м����ֻ�ij�����ԡ�
�����D4��9c����܇�^���JQF���r���e���·��һ�����S늉�VG����ٽo��늉�����JQF���r��һ���ٽo��늉�VD���������1C��2C��늸�L�����ã��ڈD4��9d��ݔ��늉�Usc��ݔ�������LjD4��9c���ٶ������������1C��2C���������γɈA��2��4��늸�L���������γɈA��1��3��������K�c�lͣ܇��̖�əCе���l�Ƅ��γ�Kб����
�D4��9 �o���e���·
������ݵĆ��������r�g��ԭ�t����JQF����F�c�_ʼ�Q��ͣ܇Ҳ�Ǖr�gԭ�t���ԕr�g��ԭ�t�p�ٵ���ݿ���ϵ�y���������m�в��ױ��C����������ƽ�ӕr�g�L�����Ч�ʵͣ�ƽ�Ӿ��Ȳ��ȱ�c��
�����چ������ϵ�y�У������ƽ��ͣ܇ǰ�����˱��Cƽ�Ӝʴ_�ȣ�������ƽ��o������D4��10��ʾ��
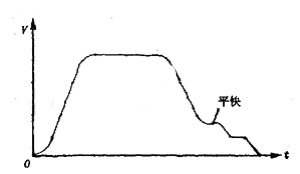
�D4��10 �挍���ٶ�����
��һƪ����ݵĆ����c�Q���·
��һƪ�����˾�C--����